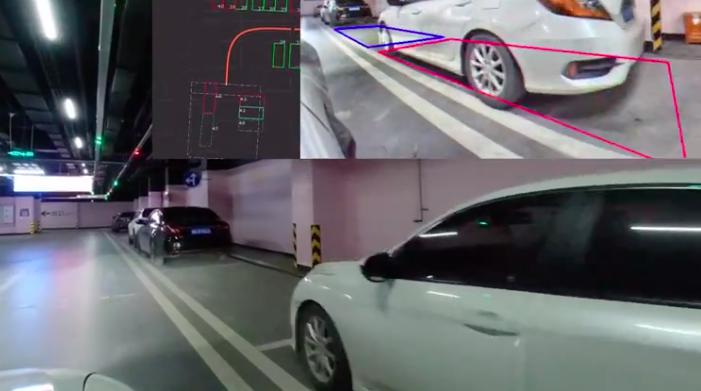
在高速端到端的自主導(dǎo)航駕駛方面,小鵬汽車(chē)的表述是," 可以實(shí)現(xiàn)接近于 L3 級(jí)自動(dòng)駕駛的場(chǎng)景表達(dá),可根據(jù)導(dǎo)航和路況自動(dòng)選擇最優(yōu)車(chē)道并自動(dòng)變道,可自動(dòng)通過(guò)高速公路樞紐。"在自動(dòng)泊車(chē)方面,現(xiàn)在的 XPILOT 3.0 可以實(shí)現(xiàn)自動(dòng)找到常用車(chē)位并泊入。與傳統(tǒng)視覺(jué)泊車(chē)不同的是,P7 利用側(cè)前攝像頭可以提前發(fā)現(xiàn)車(chē)位,而此前多數(shù)解決方案都是利用側(cè)面環(huán)視鏡頭,這樣只能在開(kāi)過(guò)車(chē)位后才能發(fā)現(xiàn)。此外,值得一提的是,小鵬具有通過(guò) SLAM 建立停車(chē)場(chǎng) 3 維模型能力,繪制停車(chē)場(chǎng)立體地圖。在國(guó)內(nèi)新勢(shì)力造車(chē)圈子中,小鵬汽車(chē)首先實(shí)現(xiàn)了 L3 級(jí)別的量產(chǎn)。雖然,對(duì)于 "L3" 級(jí)別標(biāo)準(zhǔn)的解釋和理解還有不同的聲音;但不可否認(rèn)的是,L3 從是從 " 人 " 為主到 " 車(chē) " 為主的關(guān)鍵階段,小鵬汽車(chē)還是按照計(jì)劃在推進(jìn),在 " 本土化 " 方面,例如針對(duì) " 加塞 "、標(biāo)識(shí)復(fù)雜等情景也都有針對(duì)性的解決方案。 4 月底,小鵬汽車(chē) P7 將正式上市,自動(dòng)駕駛成為重要看點(diǎn)之一。畢竟,從去年開(kāi)始,小鵬汽車(chē) P7 將具備 L3 級(jí)別自動(dòng)駕駛功能的消息就傳出,加之國(guó)內(nèi)外許多車(chē)廠在 L3 級(jí)別上的研發(fā)和量產(chǎn)速度都出現(xiàn)了下降,或者選擇直接進(jìn)入 L4,讓業(yè)界對(duì)小鵬自動(dòng)駕駛的 " 作業(yè) " 格外關(guān)注。 在自動(dòng)駕駛方面,小鵬汽車(chē)一直強(qiáng)調(diào) " 本土化 ",因?yàn)閲?guó)內(nèi)道路的復(fù)雜程度與歐美國(guó)家存在巨大差異。在這次升級(jí)中,小鵬的 XPILOT 3.0 在 " 自動(dòng)化 " 和 " 本土化 " 方面都實(shí)現(xiàn)了一定突破。 P7 的 L3 級(jí)別自動(dòng)駕駛能做什么? 在爆出的紅綠燈識(shí)別視頻中,我們看到,針對(duì)自行車(chē)、三輪車(chē)、客運(yùn)汽車(chē)、行人和外賣(mài)電動(dòng)車(chē),XPILOT 3.0 都可以進(jìn)行識(shí)別。在環(huán)島路段,對(duì)信號(hào)燈的讀取速度也和常規(guī)路段一樣,基本上是 " 秒讀 " 狀態(tài)。 對(duì)比 L2 級(jí)別來(lái)說(shuō),L3 需要做 " 決策 ",只看到有行人、車(chē)輛還不夠,需要感知身邊車(chē)輛的意圖,通過(guò)車(chē)輛轉(zhuǎn)向燈、路牌、信號(hào)燈等做綜合分析。在 XPILOT 3.0 中,可以對(duì)道路參與者信息做基礎(chǔ)預(yù)測(cè)。 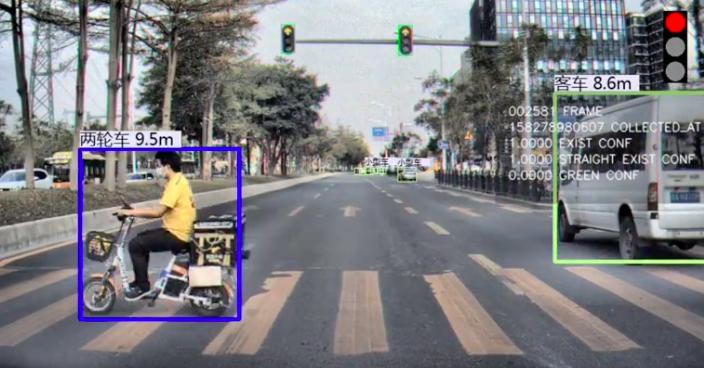 在自動(dòng)輔助駕駛的測(cè)試視頻中,小鵬 P7 通過(guò)了被網(wǎng)友調(diào)侃為 " 自動(dòng)輔助駕駛噩夢(mèng) " 的廣州南沙高速。這一高速路段的問(wèn)題是不同車(chē)道線疊加且繁雜,既有道路施工后留下的黃線,也有被刷灰的失效白線。在視頻中,P7 避開(kāi)了黃線和灰線的 " 信號(hào) " 干擾,主動(dòng)識(shí)別出了標(biāo)準(zhǔn)線,并完成換道等動(dòng)作。小鵬方面介紹,為解決車(chē)道線復(fù)雜等識(shí)別問(wèn)題,對(duì)于特殊情況,XPILOT 3.0 進(jìn)行了針對(duì)性的數(shù)據(jù)訓(xùn)練,并利用深度學(xué)習(xí)方法提高優(yōu)先級(jí)別的選擇。 
 目前,威馬、蔚來(lái)等廠商還停留在 L2 級(jí)別的量產(chǎn)階段。當(dāng)然,蔚來(lái)號(hào)稱要與 Mobileye 合作,直接面向 L4 級(jí)別,跳過(guò) L3 階段。 小鵬、蔚來(lái)、特斯拉的不同路線 在這次 P7 自動(dòng)駕駛升級(jí)方面,硬件上,小鵬使用了 NVDIA 的 Xavier 的自動(dòng)駕駛芯片,搭載了 12 個(gè)超聲波傳感器 、5 個(gè)高精度毫米波雷達(dá)以及 13 個(gè)自動(dòng)駕駛攝像頭,并結(jié)合高精地圖。 在傳感器上,小鵬汽車(chē)的 " 武裝 " 實(shí)際超越了特斯拉,可以做兩套互為冗余的 360 ° 環(huán)車(chē)身視覺(jué)系統(tǒng)。現(xiàn)在,特斯拉配有 8 個(gè)攝像頭 +1 個(gè)毫米波雷達(dá) +12 個(gè)超聲波雷達(dá)。 在攝像頭的具體布置上面,小鵬和特斯拉略有不同,其前向三個(gè)攝像頭布置在后視鏡后,可分別涵蓋 200 米距離到 120 度廣角。側(cè)前向攝像頭在后視鏡部件里面,這樣做的好處是可以針對(duì) " 加塞 " 和十字路口交通參與者往來(lái)有更好的角度。而特斯拉則是將側(cè)前向攝像頭布置在 B 柱中,視野會(huì)受限。 除此之外,XPILOT 3.0 硬件基礎(chǔ)可以還實(shí)現(xiàn)全局定位精度達(dá)厘米級(jí),相對(duì)定位精度 <0.3%。 在芯片上,小鵬汽車(chē)采用的 NVIDIA DRIVE Xavier 具備 L4 級(jí)自動(dòng)駕駛計(jì)算能力,單芯片算力為 30TOPs,功耗為 30 瓦。雖然算力方面不及特斯拉 FSD 70TOPs 的性能,但已經(jīng)足夠支持其在 L3 量產(chǎn)的需求和未來(lái) L4 級(jí)別上測(cè)試。 其實(shí),小鵬汽車(chē)在技術(shù)和線路上一直 " 咬 " 著特斯拉,希望通過(guò)全鏈路自研的方式構(gòu)建壁壘。 在核心算法自研上,小鵬汽車(chē)覆蓋了從感知到定位、再到規(guī)劃、決策,并建立了車(chē)端、云端的數(shù)據(jù)處理分析能力,可以實(shí)現(xiàn)基于實(shí)際數(shù)據(jù)的算法快速迭代,通過(guò) OTA 升級(jí)不斷升級(jí)自動(dòng)駕駛能力。 區(qū)別于行業(yè)傳統(tǒng) ADAS L2 架構(gòu)獨(dú)立運(yùn)作無(wú)法升級(jí)的弊端,小鵬汽車(chē)采用自動(dòng)駕駛架構(gòu)方案,其最重要的特征是擁有中央計(jì)算平臺(tái),模塊更加完整,系統(tǒng)具備升級(jí)和擴(kuò)展能力。 除特斯拉和小鵬外,在自動(dòng)駕駛方面,蔚來(lái)汽車(chē)的計(jì)劃是通過(guò)與 Mobileye 合作,搭載其 Mobileye EyeQ5 芯片直接進(jìn)入 L4 級(jí)別,而它面臨的問(wèn)題是在算法和激光雷達(dá)方面提出更好的解決方案。一方面,激光雷達(dá)成本依舊高昂,另一方面,蔚來(lái)基于 " 黑盒 " 進(jìn)行識(shí)別,更偏重執(zhí)行算法,未來(lái)是否能 100% 掌控?cái)?shù)據(jù)還未可知。 關(guān)于小鵬汽車(chē)如何看待做好 L3 還是直接跳到 L4 的話題,小鵬汽車(chē)副總裁吳新宙曾向 DoNews 表示,對(duì)于一個(gè)車(chē)廠來(lái)說(shuō),去追究這個(gè) L3、L4 到底怎么定義不太重要,關(guān)鍵是看做出來(lái)的東西有沒(méi)有用戶用,能不能產(chǎn)生價(jià)值。 吳新宙認(rèn)為,在自動(dòng)駕駛研發(fā)路線圖上,有很多科技公司包括 Waymo、優(yōu)步直接做 L4、L5,但目前業(yè)內(nèi)直接研發(fā) L4 存在一些困難,很難保證 100% 的安全,所以距離商用實(shí)際上還有很長(zhǎng)一段距離。 總體上看,小鵬汽車(chē)選了一條從 L1、L2、L3 再到 L4 不斷遞進(jìn)的穩(wěn)妥路線。而關(guān)于是否向特斯拉一樣自研芯片方面,業(yè)內(nèi)人士分析,小鵬汽車(chē)目前主要的任務(wù)還是將現(xiàn)有技術(shù)和商業(yè)價(jià)值最大限度的結(jié)合,在成本可控的前提下,完成量產(chǎn)目標(biāo)。 未來(lái),小鵬汽車(chē)的計(jì)劃是,在 2022 年,開(kāi)啟 XPILOT 4.0 面向城市的自動(dòng)駕駛能力釋放,包括提升城市行車(chē)效率、解決城市行車(chē)安全痛點(diǎn)。吳新宙還曾表示,小鵬汽車(chē)希望在 2024、2025 年這個(gè)節(jié)點(diǎn)上,能夠做到 L4 的水平。 |
免責(zé)聲明:本站部分文章和圖片均來(lái)自用戶投稿和網(wǎng)絡(luò)收集,旨在傳播知識(shí),文章和圖片版權(quán)歸原作者及原出處所有,僅供學(xué)習(xí)與參考,請(qǐng)勿用于商業(yè)用途,如果損害了您的權(quán)利,請(qǐng)聯(lián)系我們及時(shí)修正或刪除。謝謝!

始終以前瞻性的眼光聚焦站長(zhǎng)、創(chuàng)業(yè)、互聯(lián)網(wǎng)等領(lǐng)域,為您提供最新最全的互聯(lián)網(wǎng)資訊,幫助站長(zhǎng)轉(zhuǎn)型升級(jí),為互聯(lián)網(wǎng)創(chuàng)業(yè)者提供更加優(yōu)質(zhì)的創(chuàng)業(yè)信息和品牌營(yíng)銷(xiāo)服務(wù),與站長(zhǎng)一起進(jìn)步!讓互聯(lián)網(wǎng)創(chuàng)業(yè)者不再孤獨(dú)!
掃一掃,關(guān)注站長(zhǎng)網(wǎng)微信
 大家都在看
大家都在看